WorldSample
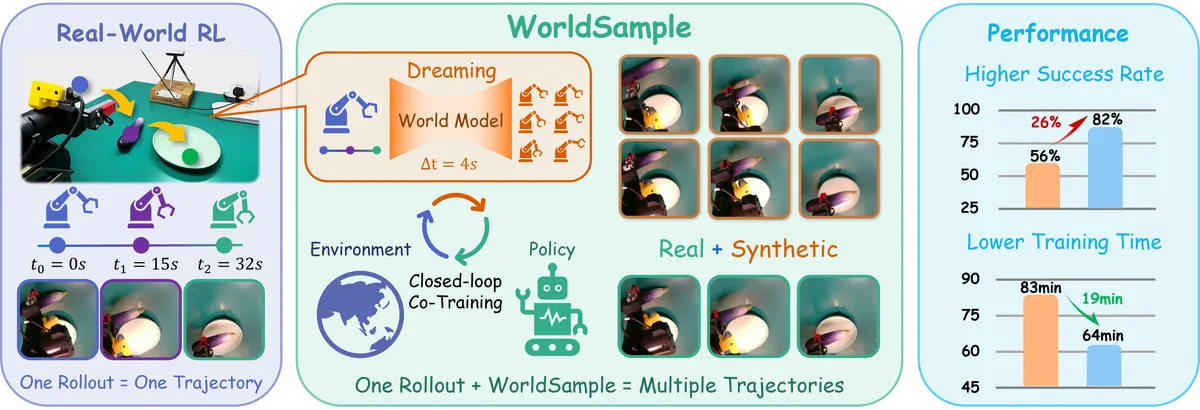
Closed-loop Real-robot RL with World Modelling
A physically grounded world-model augmentation framework for online real-robot reinforcement learning. It turns scarce physical rollouts into useful synthetic experience while keeping real interaction at the center of learning.
View project